This optional video is very scant on detail because it relies on ideas from topology. It goes without saying that you are welcome to explore these ideas in more depth in a project.
O(n)
In this video, we will talk about the topology of some groups we've already met, and some new ones.
Connected components
The group
is disconnected: it has two components.
Example:
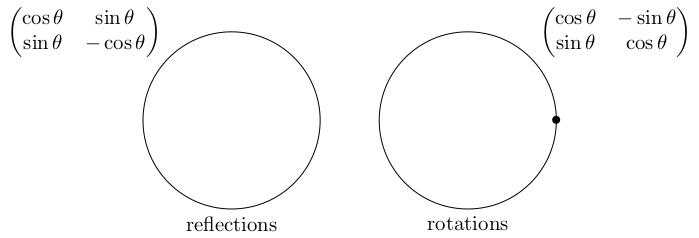
If
then
contains the plane rotations around the origin by any angle and the plane reflections in lines passing through the origin. The rotations
form a circle as the angle
varies; the reflections
also form a circle as the line of reflection rotates (the angle the line makes with the
-axis is
).
When we talk about whether a group is simply-connected, we're interested in loops starting and ending at the identity (marked as a dot in the figure). The subgroup of rotations in
contains the identity, and fails to be simply-connected because of loops which wind around the circle.
The two circles are distinguished by the value of the determinant: the rotations have determinant
and form a subgroup
("special" means determinant 1). The reflections have determinant
and do not form a subgroup (e.g. they don't contain the identity).
We have the same picture in all dimensions. The orthogonal group
has two components:
of rotations and
containing everything with determinant
(including reflections, but also other things when
). Recall that any orthogonal matrix
has determinant
because
.
Loops up to homotopy
Let's focus on
,
. The loop
turns out to be non-contractible in
when
(i.e. there is no nullhomotopy), so this is not a simply-connected group. However, if you go twice around this loop, you get something nullhomotopic. That is
is nullhomotopic (if you're interested in why, look up the Dirac spanner trick).
In fact there are precisely two "homotopy classes" of loops in
for
(the fundamental group of
is
). There is another group
and a 2-to-1 homomorphism
such that
is simply-connected. At the level of Lie algebras,
and
are isomorphic but the corresponding groups are not isomorphic. The case
is discussed in detail in another video and you can do a project about spin groups if you're interested.
Universal covers
More generally, using some ideas from topology, one can prove the following:
Theorem:
For any Lie group
there is a simply-connected Lie group
and a homomorphism
such that
is an isomorphism.
is called the universal cover of
.
In particular, Lie's theorem about exponentiating homomorphisms applies to the universal cover of any group. However, it would be nice to give some explicit examples of simply-connected groups. We're going to need to introduct one more non-simply-connected example first...
Unitary groups
Definition:
Define the unitary group
. Here,
(i.e. you transpose your matrix and take the complex-conjugate of all the entries).
The unitary group is not simply-connected: the determinant of a unitary matrix is a unit complex number because
. Therefore we get a map
. The figure below shows a cartoon picture of how
lives over
, and indicates a nontrivial loop in
which projects to a nontrivial loop in
. An explicit example of such a loop in
is
.
Special unitary groups
The subgroup
(the fibre over
of
) turns out to be a simply-connected group (for all
).
SU(2)
First consider
. In another video about
we see that
consists of all matrices
such that
. We can therefore identify
with the 3-dimensional sphere
, in other words the set of points
in 4-dimensional space such that
. This is not to be confused with the 2-dimensional sphere
of everyday experience, which is the unit sphere in 3-dimensional space. The number of dimensions is the number of coordinates we need to specify a point on the surface of the sphere, which is 2 (latitude and longitude) for the everyday sphere
, but 3 for
.
The space
is well-known to be simply-connected. You can prove it using Van Kampen's theorem, but this proof belongs in a topology course.
SU(n)
You can show that
is simply-connected by induction on
. The sketch proof is as follows.
acts by rotations on
, so preserves the unit sphere
. We therefore get a map
,
for some fixed unit vector
. The preimage of any
, which is the set of
such that
, is a copy of
. The map
is a special kind of map called a fibration with fibres
, and if the fibre (
) and base (
) of a fibration are both simply-connected then so is the total space (
). Again, this argument goes way beyond our course, but it is reassuring to know that there are many natural examples of simply-connected Lie groups.
Noncompact groups
The examples given so far are all compact groups, that is topologically closed groups of matrices whose matrix entries are bounded. There are plenty of noncompact matrix groups, like
(it contains matrices with arbitrarily large entries).
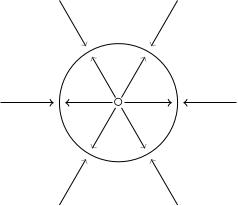
It turns out that any noncompact group deformation-retracts onto a compact subgroup (any so-called "maximal compact subgroup"). This is a fancy way of saying that the noncompact group can be squished down to the compact subgroup without changing the topology, just like how the plane minus a point can be shrunk to a circle (indeed, this is the example of
retracting onto
).
For example:
is a maximal compact subgroup, so
is simply-connected;
is a maximal compact subgroup, so
is not simply-connected;
is a maximal compact subgroup, so
is not simply-connected;
is a maximal compact subgroup so
is not simply-connected.
These results can be proved using the polar decomposition of our matrices. For example, an element of
can be written as
for some
, and the positive real numbers retract onto the subset
.