This time, we will sketch how you would prove the classification theorem for Dynkin diagrams of compact semisimple groups.
Theorem:
If
is the root system of a compact semisimple Lie group then the Dynkin diagram of
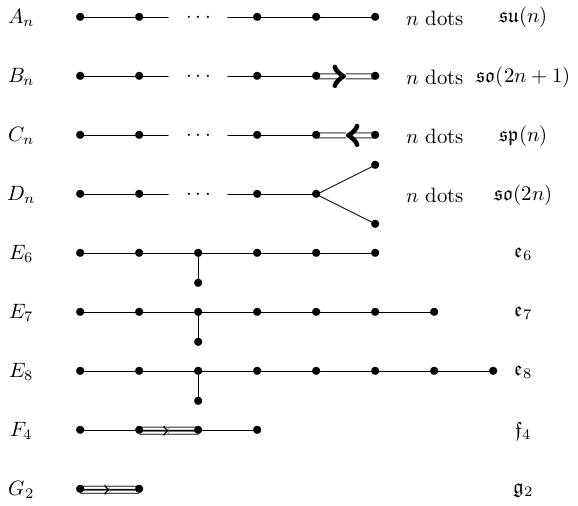
is a disjoint union of diagrams from the following list. (The diagrams on the list are connected; disjoint unions of Dynkin diagrams correspond to taking the product of the corresponding Lie algebras).
Proof
Positive definiteness of the Killing form
The idea of the proof is to use the fact that
unless
.
Remark:
This comes from the fact that the dual Killing form
is positive definite on
, the dual of
times the Lie algebra of the maximal torus. However, we're now just talking about root systems, so this is simply a fact about the Euclidean dot product.
We can write this as a matrix product
where
is the matrix whose
entry is
The entries of Q
The diagonal entries of
are
s, because the
are unit vectors. The off-diagonal entries of
are nonpositive, because
for simple roots
and
as we saw last time.
Moreover,
Here, we're taking the negative square root because we know that
is negative. Recall from before that
so
We showed that
where
is the angle between
and
. Therefore the off-diagonal entries of
can only be
,
,
, or
.
Q makes sense for any Dynkin-like graph
Observe that this matrix
makes sense for any Dynkin graph (i.e. a graph where every node is connected by 0, 1, 2 or 3 edges) whether it's on our list in the theorem or not: we just write down a matrix whose diagonal entries are 1s and whose
entry is
,
,
, or
depending on whether the number of edges connecting vertex
and vertex
is
,
,
or
.
Example:
The root system
has
.
Example:
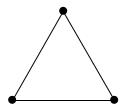
The triangle Dynkin diagram shown below (three vertices, all connected by single edges) gives the matrix
.
Q is positive definite only for graphs on our list
Proposition:
Start with any Dynkin graph. The corresponding matrix
is positive definite (i.e.
unless
) if and only if the Dynkin graph is on our list from the statement of the classification theorem.
We will not prove this: it will be a fun in-depth project for those who want it. I'll just sketch how it goes.
Example:
Consider the matrix
associated to the triangular Dynkin graph above. We have
so
is not positive definite.
Remark:
Usually, people multiply
by
to get rid of all these factors of
.
If you have a graph which contains a subgraph whose matrix
is not positive definite, then your graph also fails to be positive definite. (Exercise)
Then you need to find a suitably large collection of graphs whose matrix is not positive definite. For example, we've seen that the triangle gives a matrix which is not positive definite; a similar argument shows that the matrix associated to any closed polygonal graph is not positive definite. This means that our Dynkin graph cannot have any cycles.
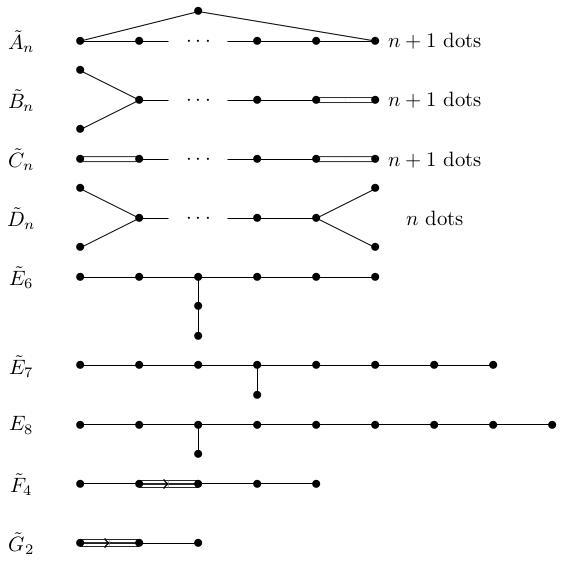
Here are some more graphs whose matrix is not positive definite:
These are all obtained by adding extra vertices to the graphs from the statement of the theorem. The strategy is to make a big list of "bad graphs"
,
, ...,
and then show that any graph which doesn't contain a bad graph must be one of
,
, ...,
.