Theorem:
If is an -by- matrix and is the unit -dimensional cube then .
Last time we saw a geometric interpretation of the determinant of a 2-by-2 matrix as the area of a parallelogram obtained by applying to a square. This result holds in all dimensions, though we will not prove it:
If is an -by- matrix and is the unit -dimensional cube then .
The absolute value signs around the determinant need to be there because areas and volumes are positive but determinants can be negative. In the proof of the 2-by-2 case, I hid the issue in the picture I drew: if I had switched the vectors and in the picture, we would have ended up with , i.e. .
In higher dimensions, is no longer a parallelogram, but a parallelopiped ("parallel-legged"): a shape whose faces are parallel pairs of congruent parallelograms.
Another useful characterisation of the determinant (which we won't prove) is the following.
Let be vectors in . Consider the simplex with vertices at . Then the volume of this simplex is where is the matrix with columns .
A simplex is the simplest convex shape you can draw with these vertices: you take the vertices, connect them by lines, and then fill in all the space in between. (More formally, this is called taking the convex hull of the vertices). In 2 dimensions this gives a triangle (3 vertices). In 3 dimensions you get a tetrahedron.
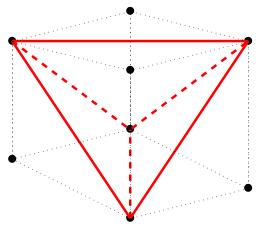
These two theorems are closely related: you can decompose a cube into simplices. Rather than proving either of them, I want to use this second theorem to calculate the volumes of some tetrahedra in .
Take , and . The corresponding tetrahedron has volume .
Take a regular tetrahedron (d4 for the roleplayers out there) with vertices at , , and . (These vertices are half of the vertices of a regular cube centred at the origin with sidelength 2.)
Translating by , we get the vertices , so we can apply our theorem with We compute the determinant using the cofactor expansion along the top row:
is the scale factor for volumes of cubes under the transformation . Since any volume is defined by subdividing/approximating by smaller and smaller cubes, is the scale factor for any volume under the transformation . From this point of view, the formula is just telling us that if we apply the transformation and then the transformation , the volumes rescale by and then by , giving a total scale factor of for the composite transformation.