Example:
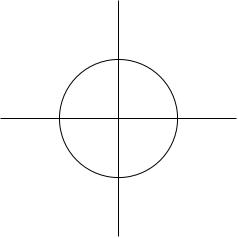
Let be the set of unit complex numbers. This is a group: if you multiply two elements of together you get another unit complex number. Geometrically, it's a circle in the complex plane.
Any can be written as for some . The map is going to be our exponential map in this example and it goes from the imaginary numbers to . The commutator bracket on vanishes: , and the Baker-Campbell-Hausdorff formula reduces to the usual law of logarithms .
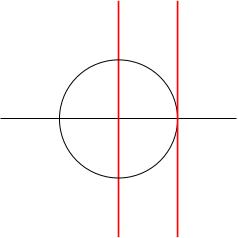
If we translate the line of imaginary numbers so that it passes through the identity element then we get a tangent line to the circle . This will be true in general: will be (parallel to) the tangent space to at the identity.