Example:
We also encountered the following representation In other words, each element is represented by the linear map which sends to .
We now turn to the representation theory of the group , which is the simplest nonabelian Lie group. Recall that is the group of special unitary 2-by-2 matrices, that is: where denotes the conjugate-transpose of . There's a nice way of writing down all the matrices in , namely: This is a 3-dimensional group because there are four variables (real and imaginary parts of and ) and one real condition , so overall there are three degrees of freedom. You can also see this from the Lie algebra: You can write the matrices from in the following form: The fact that the diagonal entries are imaginary and that the off-diagonal entries are related by a sign-change in the real part are coming from ; the fact that the diagonal entries sum to zero is .
Note that so there are 3 real coordinates and it's a 3-dimensional Lie algebra. If , we will write .
What representations of do we already know? A representation is a way of representing group elements as matrices, and our group elements are already matrices, so there is the "standard representation" This is a 2-dimensional complex representation.
We also encountered the following representation In other words, each element is represented by the linear map which sends to .
If is a vector space, then will denote the set of invertible linear maps . This is a handy piece of notation as it allows us to keep track of precisely which vector space we're acting on. For example, , but the notation only remembers the dimension of the vector space and the field we're working over, not the name of the vector space we're using.
This representation is 3-dimensional because the vector space is 3-dimensional. It is, however, a real representation, and we're really interested in complex representations, so I'll modify it slightly. We will complexify and replace it by , in other words the set of matrices where , and are complex numbers. This gives us a complex 3-dimensional representation.
Are there any more representations?
There is the trivial 1-dimensional representation , which sends every element to the 1-by-1 identity matrix. This is irreducible (it has no proper subspaces, let alone proper subrepresentations).
There is also the zero representation on the 0-dimensional vector space , which sends every matrix to the identity (a 0-dimensional vector space is just the origin with no axes, so the identity is just the map which sends the origin to the origin: there's no sensible way of writing this as a matrix).
We now have complex representations of dimension 0, 1, 2 and 3. It turns out that there is a unique irreducible representation in each dimension.
For any nonnegative integer there is an -dimensional irreducible representation ("irrep") . Moreover, any irrep is isomorphic to one of these.
The proof of the theorem will take several videos. In what remains of this video, we will define the word "isomorphic". In the next video, I'll construct the irreps . It will then take us four videos to analyse the representations enough to prove the theorem.
Given two representations
and
of the same group
on vector spaces
and
, a
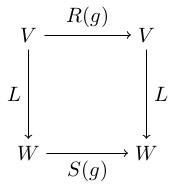
It's called an
If and is an isomorphism then we can think of as a change-of-basis matrix. The fact that is saying that, with respect to the new basis, the matrices become the matrices . So two representations are isomorphic if they are given by the same matrices with respect to some choice of basis.
Consider the representations:
,
, .
We saw in an earlier video that is obtained from by changing to a basis of simultaneous eigenvectors and . The change of basis matrix is . We will check that , so defines an isomorphism .
We have: and because
Check that