Lemma:
In fact, .
When we studied the representation theory of (or of its Lie algebra , one of the key pictures we studied was the root diagram: the weight diagram of its adjoint representation. This was a hexagonal configuration of roots at with , .
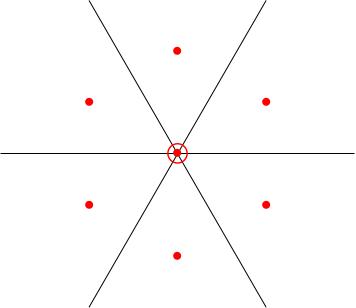
We'll write for the root space corresponding to the root and for the weight space corresponding to . Recall that
This Lie algebra has the nice property that if we pick one root and its opposite root ), and we pick generators and then the three elements span a Lie subalgebra isomorphic to . Our study of the structure of representations used the three subalgebras we obtained this way: for example, it gave us the Weyl symmetry group. This will generalise.
Suppose is a compact matrix group with Lie algebra . Let's write for the complexification . Inside we have a maximal torus with Lie algebra . Let's write . The adjoint representation is a map , defined by The same formula defines a complex representation, also written , if we allow to live in . By taking the derivative we get the Lie algebra representation and its complexification
Because we have a maximal torus, we get a weight space decomposition where The direct sum is happening over a finite set of weights. Which weights occur in this direct sum?
occurs, in other words . This is because is an abelian Lie algebra, so for all . Therefore (just like in the example).
In fact, .
Suppose , i.e. and for all . Then for all . In particular, for all .
Let's write where (so they are the real and imaginary parts of ). Then for all , therefore both real and imaginary parts must vanish, and . This means that commute with all elements in .
If either or is not contained in then either or will be an abelian subalgebra strictly containing . Then is a torus strictly containing , which contradicts the assumption that is a maximal torus.
Which other weights occur?
Any nonzero weight of the adjoint representation is called a
If and then . (We won't prove this: it's an exercise, very similar to the corresponding results for and , like " moves things to the right and moves things to the left".)
If and then unless .
If is semisimple then if and only if .
(2). Pick a basis of consisting of root vectors. We'll compute the matrix of with respect to this basis and then take the trace to find . Suppose is one of our basis vectors. Where does go under ? By part (a), .
Let's write as a block matrix with respect to the splitting into weight spaces (i.e. the block in the matrix is the matrix of the map ).
The diagonal blocks encode the maps . But if then sends to , so there are no nonzero diagonal blocks if . Therefore the trace of this matrix vanishes and .
(3) If is semisimple then the Killing form is nondegenerate, so for all nonzero there exists such that . In particular, if then there exists such that .
Take the components of with respect to the weight space splitting. Then unless . Therefore, if , we must have , so and .
The trick for extracting the subalgebras will be the following theorem which we'll prove next time.
If , are nonzero then , and will span a subalgebra isomorphic to .
True or false: If we use a sub-maximal torus, is it still true that ? If so, why? If not, what do we get instead?