08. Other operations
08. Other operations
Matrix addition
In this video, we'll define some further operations you can do to produce new matrices. The first is matrix addition If we have two -by- matrices and with entries and , we can form a new matrix with In other words, you take the th entries of both matrices and add them.
Special case: vector addition
This is most useful when and are both column vectors, i.e. -by- matrices. Let's see what it means in for vectors in . The formula is
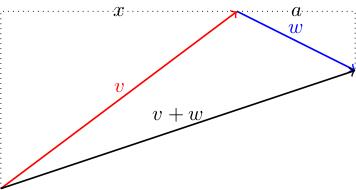
Geometrically, we add two vectors and by translating to the tip of and drawing the arrow from the tail of to the tip of . One can see from the picture that the - (respectively -) coordinate of this arrow is the sum of the - (respectively -) coordinates of and .
Rescaling
Given a number and a matrix , you can form the matrix whose entries are times the entries of .
.
Matrix exponentiation
The exponential of a number is defined by the Taylor series of : We can use the same definition to define the exponential of a matrix: Here, is understood to mean the identity matrix (the analogue for matrices of the number ).
Consider . Since , all the higher powers of vanish (the name for this is nilpotence: some power of is zero), so the matrix exponential becomes So we get the matrix for a shear as the exponential of a nilpotent matrix.
In fact, so we get a whole family of matrices which shear further and further to the right as varies.
Take . We have etc.
and in the end we get etc. The coefficient of is the Taylor series for ; the coefficent of is the Taylor series for , so overall we get So we get a general rotation matrix in 2-d by exponentiating this very simple matrix.