Remark:
More generally, the dimension of the subspace of solutions equals the number of free variables: we can think of the free variables as parameters for describing points in the subspace of solutions.
Now let's look at higher dimensional systems.
Consider the equations The set of points whose coordinates satisfy these equations is a subset of 3-dimensional space . Each equation cuts out a plane; their intersection (the set of simultaneous solutions) is a line. :

The solution of the equations is , ( is a free variable); this gives us a parametrisation of the line of intersection: it consists of vectors of the form .
Each equation gives us a plane. This plane is orthogonal to the vector . The -intercept is where , so .
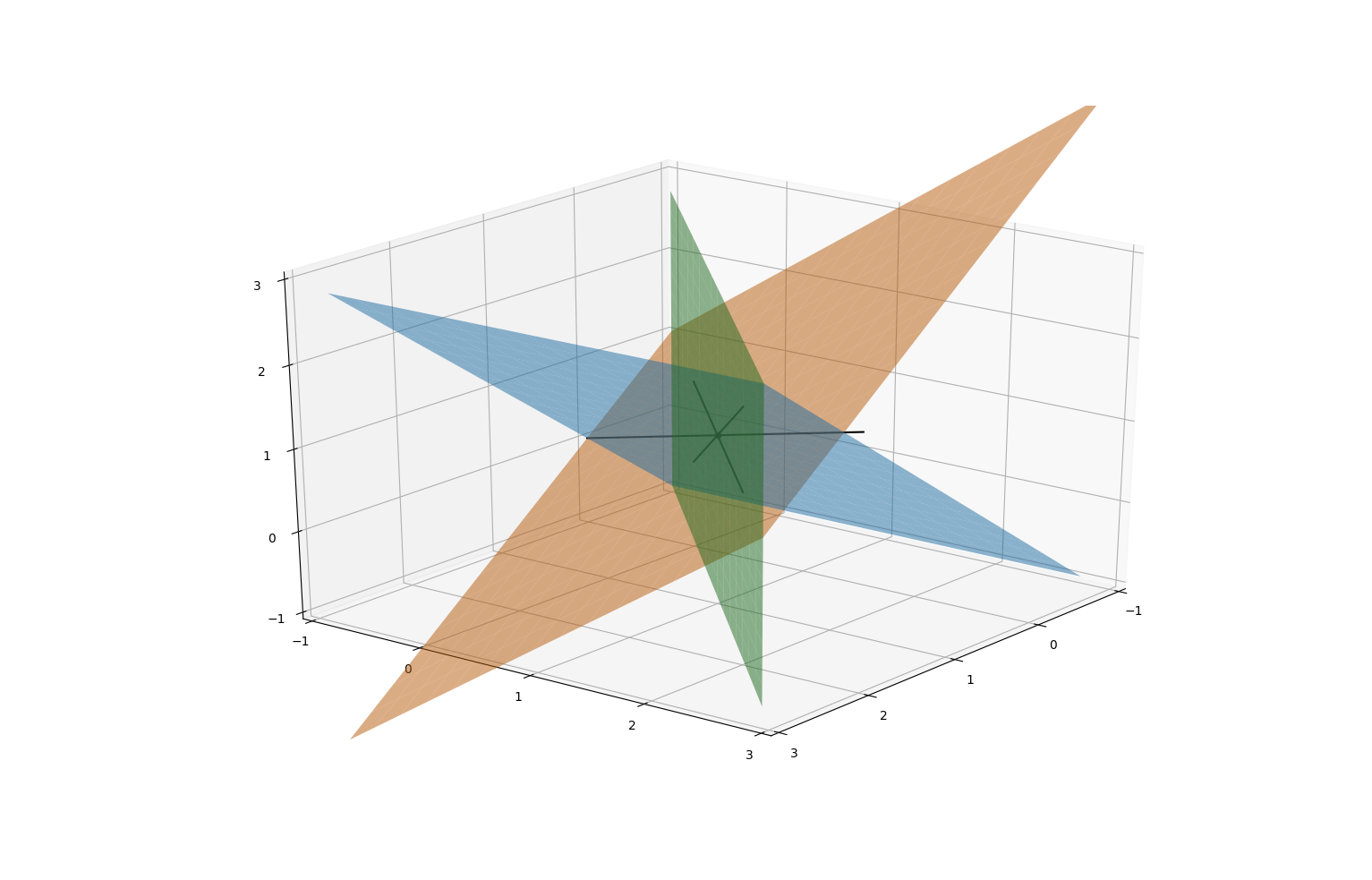
Let's consider the system The first two planes are the same as before; the third equation gives a third plane. The set of solutions is the set of triple intersections between these planes. Solving, we get and , so . Therefore there is a unique triple intersection point at .
An equation in variables defines a hyperplane in -dimensional space . This is the hyperplane orthogonal to the vector .
If is a vector of variables and is a system of simultaneous equations encoded with an -by- matrix then each row of defines a hyperplane in . The set of solutions is a subspace of . Subspace is a catch-all name, which includes points, lines, planes, hyperplanes, and everything in between (for which we don't have everyday words).
Consider the equations and . This is a pair of equations in four variables, so defines a subspace of solutions in . Each equation gives a 3-dimensional hyperplane in . Their intersection is a 2-dimensional subspace (plane) living in . Solving the equations: , . We see that are free variables and are dependent variables. The fact that there are two free variables is another way of saying that the subspace of solutions is 2-dimensional: each free variable is a coordinate on the subspace of solutions.
More generally, the dimension of the subspace of solutions equals the number of free variables: we can think of the free variables as parameters for describing points in the subspace of solutions.