Definition:
The quadratic form is positive definite if it's positive whenever we substitute in real numbers other than .
An ellipse is a curve in the plane: it looks like a squashed circle:
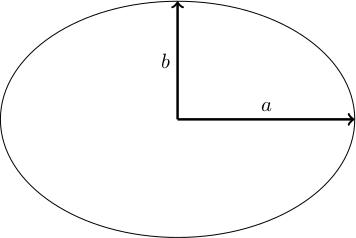
The one in the diagram above has been squashed/stretched vertically/horizontally, and has equation . Here, is the biggest value that can take (because if then has to be zero) and is the biggest value that can take. Suppose . If you look at diameters (chords of the ellipse passing through the origin) then the longest will have length (pointing in the -direction) and the shortest will have length (pointing vertically). We call the semimajor axis and the semiminor axis.
Suppose someone gives you an ellipse that has been squashed in some other direction. What is the equation for it? Conversely, if someone gives you the equation of an ellipse, how do you figure out the semimajor and semiminor axes?
What's the general equation of an ellipse? Assuming its centre of mass is at the origin, the general equation has the form If I wanted the centre of mass to be elsewhere, I could add terms like .
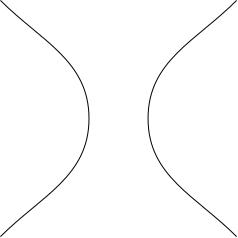
The constants can't be just anything. For example, if we take , , , then we get , which is the equation of a hyperbola:
The condition on we need to get an ellipse is positive definiteness:
The quadratic form is positive definite if it's positive whenever we substitute in real numbers other than .
An ellipse is a subset of cut out by the equation where are constants making the left-hand side positive definite.
Consider the matrix . Let be unit length eigenvectors of (with eigenvalues ). Pick coordinates so that the new - and -axes point along the eigenvectors (and so that sits at and sits at ). In these new coordinates, the equation of the ellipse becomes
This change of coordinates will actually be a rotation of the usual coordinates.
The matrix arises as follows. Let . Then
If then the eigenvectors and are orthogonal to one another. This works for any matrix for which .
We have and . Consider . We have: We also have (because ), so Therefore . Since , we can divide by and get .
This is why the change of coordinates in the theorem is just a rotation: your eigenvectors are orthogonal, so just rotate your and -directions until they point in these directions.
In the new coordinates (which I'm still calling ), we have , so: where we have used and . This proves the theorem.
The theorem tells us that the semimajor and semiminor axes point along the eigenvectors of . Comparing the equations, we see that the semimajor and semiminor axes are and .
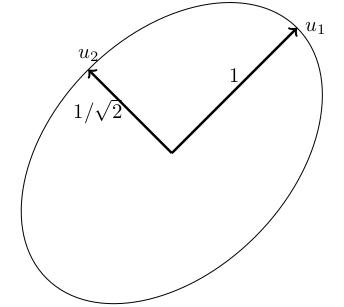
Consider the ellipse The matrix is This has characteristic polynomial , which has roots , i.e. and .
The unit eigenvectors are:
for , ,
for , .
What does this tell us? The semimajor and semiminor axes point in the - and -directions: rotated by degrees from the usual axes. The lengths are and .
Exactly the same thing works in higher dimensions: an ellipsoid is given by where is a positive definite quadratic form, for some symmetric matrix , and the ellipsoid is related to the standard ellipsoid by rotating so that the axes point along the eigendirections of . The coefficients are given by where are the eigenvalues.