(0.00) In this section, we're going to introduce the idea of
continuous paths, loops and homotopies of loops. I will assume you're
happy with the notions of topological space and continuous
maps between topological spaces. If you haven't come across these
ideas, I have a series of videos covering these ideas which you can
watch at any point during the module. If you like, you can mentally
replace the word ``topological space'' with ``metric space'' until
you've watched those videos.
Paths
(1.06) Let \(X\) be a topological space. A path in
\(X\) is a continuous map \(\gamma\colon[0,1]\to X\). You can think
of this as a continuous parametric curve \(\gamma(t)\) with
parameter \(t\in[0,1]\).
The map \(\gamma(t)=(t,0)\) is a path in the plane
\(X=\mathbf{R}^2\) which moves along the \(x\)-axis from \((0,0)\)
to \((1,0)\).
The map \(\gamma(t)=(\cos(2\pi t),\sin(2\pi t))\) is another path in
the plane which moves around the unit circle. This is a loop
(it starts and ends at the same point \((1,0)\).
A path \(\gamma\colon[0,1]\to X\) is called a loop if
\(\gamma(0)=\gamma(1)\). It is said to be a loop based at
\(x\) if \(\gamma(0)=\gamma(1)=x\).
Free homotopy of loops
(4.06) Roughly speaking, a free homotopy of loops is a continuous
one-parameter family of loops \(\gamma_s(t)\) interpolating between
two loops \(\gamma_0(t)\) and \(\gamma_1(t)\). More precisely:
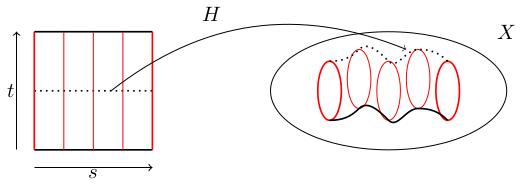
A free homotopy of loops is a continuous map \(H\colon
[0,1]\times[0,1]\to X\) such that \(\gamma_s(t):=H(s,t)\) is a loop
for each fixed \(s\in[0,1]\), that is \(H(s,0)=H(s,1)\) for all
\(s\in[0,1]\).
Figure 1.In this figure, we see the domain and target of a
free homotopy \(H\colon[0,1]\times[0,1]\to X\). The loops
\(\gamma_s(t)=H(s,t)\) are indicated in red for
\(s=0,\frac{1}{4},\frac{1}{2},\frac{3}{4},1\). The path traced by
basepoints is drawn in thick black; as a visual aid, the path traced
by the midpoints of the loops is also drawn in dotted black.
We will often write \(\gamma_s\) instead of \(H\) to emphasise the
fact that \(H\) is a family of loops.
Continuity of \(H\) as a map of two variables is what gives us a
continuous family of continuous loops.
Based homotopy of loops
(7.53) We will need a slightly more restricted notion of homotopy.
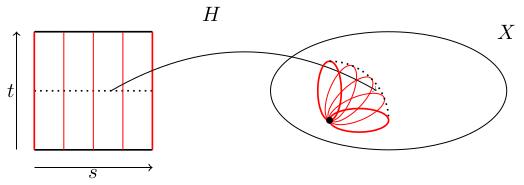
If \(x\in X\) is a basepoint, a homotopy based at \(x\) is a
homotopy \(H\colon[0,1]\times[0,1]\to X\) where \(H(s,0)=H(s,1)=x\)
for all \(s\in [0,1]\). In other words, all the loops
\(\gamma_s(t)=H(s,t)\) pass through the basepoint \(x\) at
\(t=0,1\). If we have a based homotopy \(\gamma_s\) we will write
\(\gamma_0\simeq\gamma_1\) and say that \(\gamma_0\) is homotopic to
\(\gamma_1\).
By focusing on based loops (and based homotopy) we will be able to
concatenate loops (because they all start and end at the same point)
and this will give us a group structure on (homotopy classes of)
loops.
Loops in \(\mathbf{R}^n\) are contractible
(11.04) If \(\gamma\colon[0,1]\to\mathbf{R}^n\) is a loop
based at the origin \(0\) then \(\gamma\) is based-homotopic to the
constant loop \(t\mapsto 0\).
The map \(H(s,t)=(1-s)\gamma(t)\) is a continuous map such that
\(H(s,0)=0=H(s,1)\), so it is a based homotopy. At \(s=0\), we get
\(\gamma_0(t)=H(0,t)=\gamma(t)\). At \(s=1\), we get
\(\gamma_1(t)=H(1,t)=0\), so this is a based homotopy from
\(\gamma\) to the constant loop.
A homotopy from a loop \(\gamma\) to a constant loop is called a
nullhomotopy (and we say that \(\gamma\) is contractible if
it is nullhomotopic).
Pre-class questions
Is the homotopy \(\gamma_R\) from the previous video a based
homotopy or a free homotopy?
Navigation
Previous video: 1.01 Winding numbers and the fundamental theorem
of algebra.
Next video: 1.03 Concatenation and the fundamental group.