In the last video, we saw that a 2-by-2 matrix of numbers
defines a geometric transformation of the plane
:
Remark:
Recall that
denotes the real number line.
denotes the 2-dimensional plane of all column vectors of height 2 (i.e.
);
denotes the 3-dimensional space of all column vectors of height 3 (i.e.
; and more generally,
denotes the
-dimensional space of all column vectors of height
(i.e.
).
Just as the coordinates
encode points in the plane, we should think of the matrix
as encoding a transformation of the plane. In this lecture, we will take a range of examples and see what the corresponding transformation looks like.
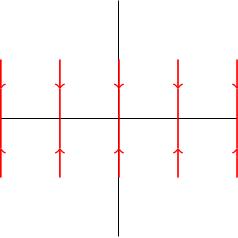
Example 1
Let
. If I apply
to
then I get
This takes
to the point on the
-axis with the same
-coordinate, so
represents a vertical projection map to the
-axis.
Example 2
Consider the action of
. This sends
to
; this transformation leaves everything as it was: it is called the identity transformation. We call this matrix the identity matrix, and we often write this matrix as
; it plays the role of the number
in the algebra of matrices.
Useful lemma
Lemma:
Let
, let
and
. Then
is the first column of
, i.e.
.
is the second column of
, i.e.
.
We'll call
basis vectors, which basically means that any other vector can be written as a combination of
and
in a unique way. More on this in MATH220.
We'll just check it for
:
The calculation for
is similar.
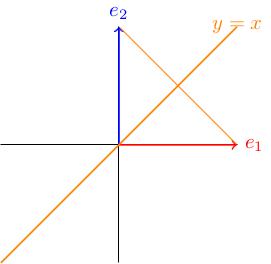
Example 3
Take
.
Where does
go? It goes to the first column of
, which is
.
Where does
go? It goes to the second column of
, which is
.
So
and
get switched. This corresponds to a reflection in the line
:
Let's check that the line
is indeed fixed by the action of
. The vectors
(and only these ones) lie on this line, so let's compute:
which indeed tells us that the points on the line
are fixed.
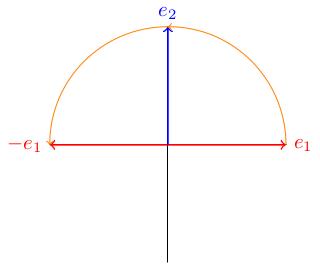
Example 4
Take
.
Where does
go? It goes to the first column of
, which is
.
Where does
go? It goes to the second column of
, which is
.
We see that this looks like a 90 degree (
radian) rotation. This makes sense, because the matrix
for a rotation by an angle
specialises to
when
, because
and
.
Example 5
Take
. We have
,
.
So
is fixed, but
is slanted over in the
-direction. In fact, the whole
-axis gets slanted in the
-direction, for example if we compute
we get
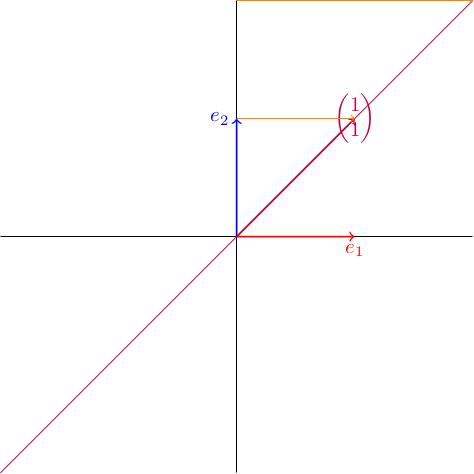
Example 6
As one final example, we'll take
. What on earth does this correspond to? I claim that it corresponds to a shear in a different direction. How can we find the fixed direction?
If
points in the direction fixed by
then
(that's what it means to be fixed). Therefore
In other words, the first entries of
and
must coincide, and so must the second entries. This gives us a pair of linear simultaneous equations:
These are both equivalent to
, so the line
is fixed.
Remark:
Not all matrices have fixed directions, but if they do then this method will find it.
Outlook
In the next video, we will take a look at bigger matrices and higher-dimensional spaces.