Lemma:
If is a complex representation then where where .
We now turn to the group , the group of 3-by-3 special unitary matrices. This is an instructive example: its representation theory shares many similarities to the representation theory of other semisimple groups.
When we studied , the key tool we introduced was the weight decomposition. In other words, given a representation of on a complex vector space , we decomposed as a direct sum of subspaces where was a simultaneous eigenspace (with eigenvalue ) for the action of the diagonal subgroup . This was possible because .
For , the subgroup of diagonal matrices is isomorphic to : here stands for torus: a 2-dimensional torus has two circular coordinates (latitude and longitude) just like . For compact matrix groups more generally, the analogue of will be a (possibly higher-dimensional) maximal torus (more on that later).
If is a complex representation then where where .
For , our torus was just a copy of , so we only needed one integer to index the weight spaces. Now we need two: one for each -factor in the torus.
We will postpone the proof until we have seen some examples of weight diagrams. The weight diagrams will now be patterns of dots in the plane.
Take , the standard representation of (i.e. considering a matrix in tautologically as an element of ). We pick the standard basis . We have
so so
spans the weight space ( , ).
spans the weight space ( , ).
spans the weight space ( , ).
The obvious way to represent these would be to simply draw the points in the plane. For reasons that will become clear when we discuss the Killing form, we will draw the -axis at 120 degrees to the -axis. For now, the justification is just that this restores the symmetry we broke when we chose to express the bottom-left entry of in terms of the other two diagonal entries (instead of writing something equally valid like ).
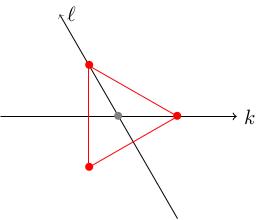
We have also drawn the origin in grey in this picture: it is not a weight of the standard representation, the weights are red.
Consider . A basis for this is given by How do these transform under ?
Since , we have so lives in the weight space . Similarly, we get For example, .
Plotting these weights in the plane (with respect to our tilted axes) we get:
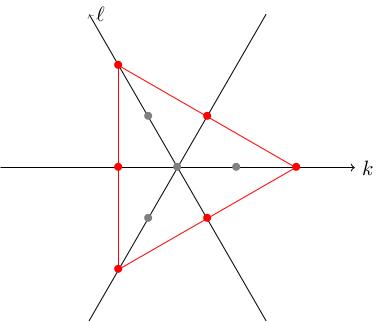
We have also added:
the line , to complete the symmetry of the diagram;
the points , , , in grey just to give a sense of the size of the diagram. Only the red dots are weights of the representation.
The kinds of diagrams we will get for weight diagrams of representations will be triangles and hexagons.
Consider the subgroup This is isomorphic to and decomposes into weight spaces for the action of :
Define .
The action of preserves each , i.e. implies .
This lemma will imply the result because now each decomposes under the action of : In other words, elements of transform as desired under both and and hence under :
If then . We want to show that , i.e. that
Let's compute. Since and commute with one another, the same is true of and . Therefore Since , we get as required.
This argument works more generally for finding weight decompositions of representations of : you inductively find the weight space decomposition with respect to and show that the final factor preserves the weight spaces (because the group is abelian), then decompose these weight spaces further with respect to the action of the final factor. This would give us integer weights and our weight diagrams would be collections of dots in -dimensional space. For we get weight diagrams in , for we get weight diagrams in , etc.
If denotes the standard representation of , what is the weight diagram of ? Can you guess the weight diagram of ?
What do you think the weight diagram of the standard 4-dimensional representation of would look like?